



对传统机器人来说,大负载的机器人控制难度会更大,这极大影响了机器人的效率和稳定性。
其主要原因如下:
(1)传统的机器人编码器安装在减速机输入侧,但是减速机多少都有背隙,随着臂展的变长,背隙造成末端点位的偏差也会随之放大。
(2)机器人在低速区,静摩擦、动摩擦转矩切换的时候,输入轴在匀速转动,输出轴可能呈现出一快一慢的跳跃式运动,而且负载越重,正压力、摩擦力都会增大,“爬行”现象还会表现得更明显。
(3)机器人连杆截面的扭转刚度是一定的,随着臂展的变长,末端的扭转角度加大,这会降低整个机械传动链的谐振频率,进而影响到伺服的控制带宽,降低了控制性能、精度。
(4)实际应用中,大负载机器人随着惯量增大,系统的固有频率降低,响应速度变慢,稳定性变差,超调量变大。
(5)机器人没有主动安全防护功能。
为解决上述痛点难点,节卡机器人自主研发了以下3大核心技术:
双编码器全闭环控制策略
“在设计JAKA Zu 12的过程中,我们特别注重它的工作范围、有效负载和运行性能。JAKA Zu 12自重41kg,负载可达12kg,工作半径1327mm,采用高性能的结构设计及先进的伺服技术,具有高负载、高精度、更安全的优势。”JAKA Zu 12产品经理说。
节卡机器人伺服驱动器采用高分辨率的双编码器全闭环控制策略,在减速机输入、输出侧各安装一个编码器,内环保证动态跟踪,外环实现精准定位。
这样减速机的背隙、摩擦力变化导致的跳动,都处于位置闭环之内,既解决了“爬行”的问题,又提高了定位精度;在减速机输出侧,能够实现高达±0.002°机械角的单轴点位控制精度,JAKA Zu 12的重复定位精度高达0.024mm(用莱卡激光跟踪仪,依据GB T12642测试的数据)。
动力学转矩前馈策略
基于节卡机器人动力学控制功能,在任何负载、速度、姿态下,都可以预测出各个关节应该输出的力矩。
通过动力学转矩前馈,叠加伺服本身的闭环控制,实现高精度闭环控制;这种控制策略的优势,就在于通过准确的动力学模型来保证位置的跟踪,从而削弱机械谐振频率、惯量匹配问题对控制的影响。

得益于此,JAKA Zu 12可以在正装、侧装、倒装的底座上进行作业,对部署环境的要求更低,而对底座的刚度要求,也远没有传统机器人高。
安全控制策略-力矩限制 & 碰撞检测
传统机器人一般只做位置控制,没有碰撞检测安全功能,所以当高负载机器人在运动过程中,一旦碰到人,会非常危险。
节卡机器人支持输出力矩限制和碰撞检测的功能,在实现位置控制的同时,还可以对机器人的输出力矩进行限制。
如果机器人与周围环境发生碰撞,机器人会迅速停止,并往反方向进行反弹,这样可以把碰撞造成的伤害降到最低;同时,发生碰撞后,用很小的外力还可以推动机器人,这样即便有人被机器人卡住,还可以保证人身安全。

大负载协作机器人在产线上的表现也得到了认可。
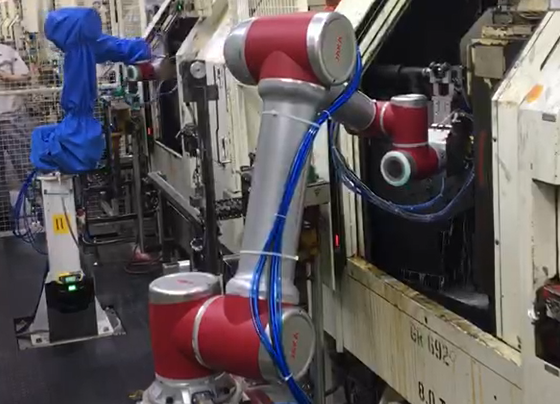
某知名品牌电器的生产经理曾公开表示:“我们在产线上,部署了节卡协作机器人JAKA Zu 12,运行效果远超预期。JAKA Zu 12在臂展如此长的情况下,末端定位精度还这么高,并且末端运行超平稳、占地面积小、安全性高,不仅提高了生产过程的自动化程度,还改善了作业人员的工作环境。”
目前,拥有如此硬核的技术JAKA Zu12已在码垛、分拣、包装、搬运、上下料、装配等常见的工业生产领域中应用,数据表明,节卡大负载机器人在替代人工,提高生产效率,稳定产品质量等方面都具备显著的应用价值。
本文地址: https://www.xsyiq.com/2077.html
网站内容如侵犯了您的权益,请联系我们删除。
