


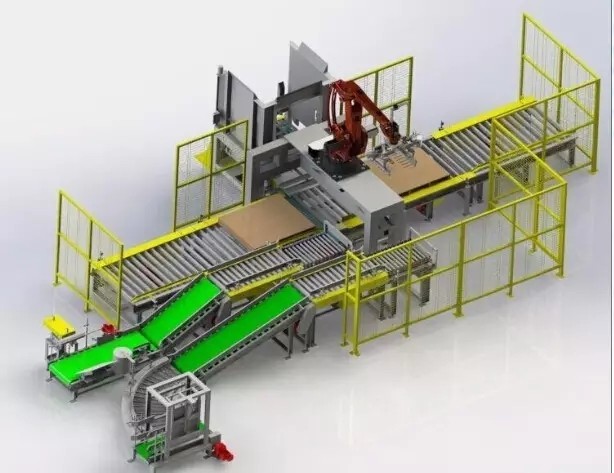
目前,食品饮料包装行业的机器人作业基本属于工作站的形式,从分拣到包装、码垛乃至搬运全部由机器人完成不仅考验着自动化生产线的技术布局,而且有较高成本压力,况且,部分产品的部分工序尚难以用机器人完成,因此如何发挥机器人的高效性是一个值得长期探讨的课题。
拣选
拣选作业是由机器人来进行品种拣选,如果品种多,形状各异,机器人需要带有图象识别系统和多功能机械手,机器人每到一种物品托盘就可根据图象识别系统“看到”的物品形状,采用与之相应的机械手抓取,然后放到搭配托盘上。
目前抓取分拣机器人在食品饮料行业应用逐渐增多,主要集中在后段包装中,比如将小颗粒的巧克力、糖果或者盒装或者袋装的食品饮料快速抓取并放置到指定的分拣传输带或者包装盒中,这种机器人不仅像人的双手一样灵巧,而且有足够的判断能力。未来,空无一人的仓库,一台台机器人将货架送到包装台,通过准确识别货物,分拣出需要的商品,打包后放在传输带上。分拣机器人已经形成了样机,一旦这些智能化的分拣机器人应用于包装行业,将极大地提高仓储管理的工作效率,压缩人工成本。分拣机器人要进入市场仍需一段时间,短期内包装拣选必然是以自动化与人工辅助的形式存在的。
当前,分拣机器人一般以并联机器人为主,也就是所谓的蜘蛛手,通常是四轴,也有六轴并联机器人。
包装
在食品饮料行业,分拣的动作一般以效率为第一要求,而难度系数同样较大的则是包装,要把零散的物品准确放置在包装袋或者包装箱内,这不仅考验机器人的灵活性和准确度,而且要求机器人具备视觉和可计算的功能。
目前,食品饮料包装行业的机器人作业基本属于工作站的形式,从分拣到包装、码垛乃至搬运全部由机器人完成不仅考验着自动化生产线的技术布局,而且有较高成本压力,况且,部分产品的部分工序尚难以用机器人完成,因此如何发挥机器人的高效性是一个值得长期探讨的课题。
拣选
拣选作业是由机器人来进行品种拣选,如果品种多,形状各异,机器人需要带有图象识别系统和多功能机械手,机器人每到一种物品托盘就可根据图象识别系统“看到”的物品形状,采用与之相应的机械手抓取,然后放到搭配托盘上。
目前抓取分拣机器人在食品饮料行业应用逐渐增多,主要集中在后段包装中,比如将小颗粒的巧克力、糖果或者盒装或者袋装的食品饮料快速抓取并放置到指定的分拣传输带或者包装盒中,这种机器人不仅像人的双手一样灵巧,而且有足够的判断能力。未来,空无一人的仓库,一台台机器人将货架送到包装台,通过准确识别货物,分拣出需要的商品,打包后放在传输带上。分拣机器人已经形成了样机,一旦这些智能化的分拣机器人应用于包装行业,将极大地提高仓储管理的工作效率,压缩人工成本。分拣机器人要进入市场仍需一段时间,短期内包装拣选必然是以自动化与人工辅助的形式存在的。
当前,分拣机器人一般以并联机器人为主,也就是所谓的蜘蛛手,通常是四轴,也有六轴并联机器人。
包装
在食品饮料行业,分拣的动作一般以效率为第一要求,而难度系数同样较大的则是包装,要把零散的物品准确放置在包装袋或者包装箱内,这不仅考验机器人的灵活性和准确度,而且要求机器人具备视觉和可计算的功能。
目前,食品饮料包装行业的机器人作业基本属于工作站的形式,从分拣到包装、码垛乃至搬运全部由机器人完成不仅考验着自动化生产线的技术布局,而且有较高成本压力,况且,部分产品的部分工序尚难以用机器人完成,因此如何发挥机器人的高效性是一个值得长期探讨的课题。
拣选
拣选作业是由机器人来进行品种拣选,如果品种多,形状各异,机器人需要带有图象识别系统和多功能机械手,机器人每到一种物品托盘就可根据图象识别系统“看到”的物品形状,采用与之相应的机械手抓取,然后放到搭配托盘上。
目前抓取分拣机器人在食品饮料行业应用逐渐增多,主要集中在后段包装中,比如将小颗粒的巧克力、糖果或者盒装或者袋装的食品饮料快速抓取并放置到指定的分拣传输带或者包装盒中,这种机器人不仅像人的双手一样灵巧,而且有足够的判断能力。未来,空无一人的仓库,一台台机器人将货架送到包装台,通过准确识别货物,分拣出需要的商品,打包后放在传输带上。分拣机器人已经形成了样机,一旦这些智能化的分拣机器人应用于包装行业,将极大地提高仓储管理的工作效率,压缩人工成本。分拣机器人要进入市场仍需一段时间,短期内包装拣选必然是以自动化与人工辅助的形式存在的。
当前,分拣机器人一般以并联机器人为主,也就是所谓的蜘蛛手,通常是四轴,也有六轴并联机器人。
包装
在食品饮料行业,分拣的动作一般以效率为第一要求,而难度系数同样较大的则是包装,要把零散的物品准确放置在包装袋或者包装箱内,这不仅考验机器人的灵活性和准确度,而且要求机器人具备视觉和可计算的功能。
目前,食品饮料包装行业的机器人作业基本属于工作站的形式,从分拣到包装、码垛乃至搬运全部由机器人完成不仅考验着自动化生产线的技术布局,而且有较高成本压力,况且,部分产品的部分工序尚难以用机器人完成,因此如何发挥机器人的高效性是一个值得长期探讨的课题。
拣选
拣选作业是由机器人来进行品种拣选,如果品种多,形状各异,机器人需要带有图象识别系统和多功能机械手,机器人每到一种物品托盘就可根据图象识别系统“看到”的物品形状,采用与之相应的机械手抓取,然后放到搭配托盘上。
目前抓取分拣机器人在食品饮料行业应用逐渐增多,主要集中在后段包装中,比如将小颗粒的巧克力、糖果或者盒装或者袋装的食品饮料快速抓取并放置到指定的分拣传输带或者包装盒中,这种机器人不仅像人的双手一样灵巧,而且有足够的判断能力。未来,空无一人的仓库,一台台机器人将货架送到包装台,通过准确识别货物,分拣出需要的商品,打包后放在传输带上。分拣机器人已经形成了样机,一旦这些智能化的分拣机器人应用于包装行业,将极大地提高仓储管理的工作效率,压缩人工成本。分拣机器人要进入市场仍需一段时间,短期内包装拣选必然是以自动化与人工辅助的形式存在的。
当前,分拣机器人一般以并联机器人为主,也就是所谓的蜘蛛手,通常是四轴,也有六轴并联机器人。
包装
在食品饮料行业,分拣的动作一般以效率为第一要求,而难度系数同样较大的则是包装,要把零散的物品准确放置在包装袋或者包装箱内,这不仅考验机器人的灵活性和准确度,而且要求机器人具备视觉和可计算的功能。
本文地址: https://www.xsyiq.com/3688.html
网站内容如侵犯了您的权益,请联系我们删除。
