


工业机器人由主体、驱动系统和控制系统三个部分组成。主体是用来模仿人臂、手腕和手的功能,执行搬运、装配、包装和喷涂等生产作业。驱动系统驱控机器人的执行机构产生相应的动作,包括液压驱动、气压驱动、电气驱动和机械驱动等。控制系统用于控制机器人的行为,包括程序给定、程序修正、速度给定、位置给定、主模块控制、伺服控制、比较控制和通信控制等。

工业机器人的几种常用结构形式有:直角坐标形式、圆柱坐标形式、球面坐标形式、关节坐标形式、并联机器人、物流机器人等。
工业机器人是现代制造业的重要组成部分,它们可以提高生产效率和质量。以下是几种常用的工业机器人结构形式:
1、关节型机器人(Joint Robot):关节型机器人具有多个旋转关节,可以在多个方向上自由运动。这种结构使得机器人能够进行复杂的空间定位和操作任务。关节型机器人广泛应用于装配、搬运和焊接等应用场景。
2、并联机器人(Parallel Robot):并联机器人由多个并联的关节组成,每个关节都有独立的执行器。这种结构使得机器人可以在多个方向上同时运动,提高了生产效率。并联机器人常用于高速生产线上的装配和搬运任务。
3、串联机器人(Serial Robot):串联机器人由一个中央执行器控制多个从动器(也称为末端执行器)。从动器负责完成具体的操作任务,如抓取、放置或焊接。串联机器人适用于需要精确定位和控制的任务,如半导体制造。
4、平面型机器人(Planar Robot):平面型机器人具有平坦的工作表面,可以进行平面上的精确定位和操作。平面型机器人通常用于电子元器件的生产和检测环节。
5、圆柱型机器人(Cylindrical Robot):圆柱型机器人具有圆柱形的工作空间,可以进行圆柱形物体的加工和搬运。圆柱型机器人常用于汽车制造、金属加工等行业。
这些结构形式只是工业机器人的一部分,实际应用中可能还有其他类型的机器人。根据具体应用场景和需求,可以选择合适的工业机器人结构形式。
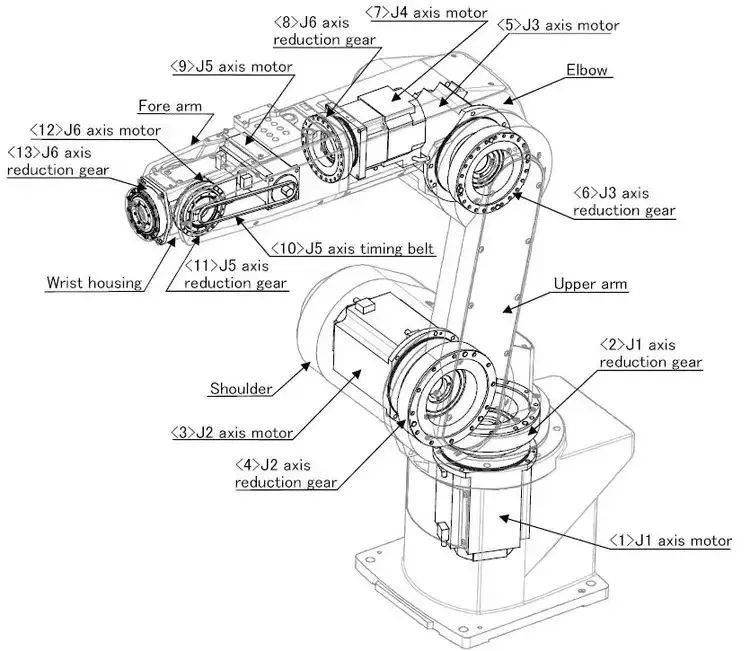
六轴机器人本体结构
工业机器人的结构通常包括以下几个部分:
1、机身:工业机器人的机身通常由金属制成,可以是固定式或可移动式。机身内部包含各种传感器、执行器和控制系统。
2、关节:工业机器人的关节是其运动的核心部件。关节通常由电机、减速器、传动轴和齿轮组成,可以将机器人的手臂或腕部运动控制在多个方向上。
3、手臂或腕部:工业机器人的手臂或腕部通常由一系列关节组成,可以进行各种复杂的动作,如抓取、旋转和放置等。手臂或腕部的末端通常装配有各种工具,如夹具、钳子和喷枪等。
4、控制系统:工业机器人的控制系统通常包括计算机、控制器、传感器和执行器等组件。控制系统可以根据预设的程序或实时数据来控制机器人的运动和操作。
5、电源和通信设备:工业机器人需要稳定的电源供应和可靠的通信设备,以确保其正常运行和与其他设备的协同工作。

总的来说,工业机器人的结构复杂多样,不同类型的机器人可能具有不同的结构特点和功能模块。工业机器人是一种能够自主运动和执行任务的智能化机器人,其主要由机械臂、末端执行器、控制系统和传感器等组成。机械臂是机器人的核心部件,负责完成机器人的运动和操作;末端执行器则根据不同的工作需要选择不同的工具来实现工作操作。控制系统是机器人的核心控制部分,控制机器人的运动和工作,传感器用于探测环境和物体,测量各种参数反馈给控制系统实现机器人自动化操作和控制。掌握工业机器人的结构组成对于了解其工作原理和应用领域有着重要的意义。
本文地址: https://www.xsyiq.com/7270.html
网站内容如侵犯了您的权益,请联系我们删除。
