


KUKA C1-C2机器人工作原理
 描述
描述
1 机器人
2 控制柜
3 马达电缆 X30
4 数据电缆 X31
5 马达电缆 X20
6 数据电缆 X21
7 接地电缆 16 mm²
8 电源 400 V 3~ X1
主要内部安全监视 :
电机监视 : 电机通过在电机绕组中的温度探头进行过载保护。
电压监视 : 如果过高或过低的电压超出了半导体放大器的允许的范围,将导致伺服驱动模块的关断。
温度监视 : 控制柜的温度(内部温度)受到监视.温度超出范围将导致控制部分的关断。
点动(自动中断功能) :
所有工作程序都能够在降低的速度条件下以手动的,测试运行方式来完成动作。工作程序只有在按住」START」键的情况下才能运行。一旦放开」start」键,机器人就停止动作。只有通过重新按」start」键才能继续运行工作程序。
关闭机器人控制系统
在关闭时,机器人保持停止并且机器人控制系统关机。机器人控制系统自动备份数据。
KRL 库卡机器人程式语言(KUKA Robot Language)
KSS 库卡系统软体
VxWorks 实时作业系统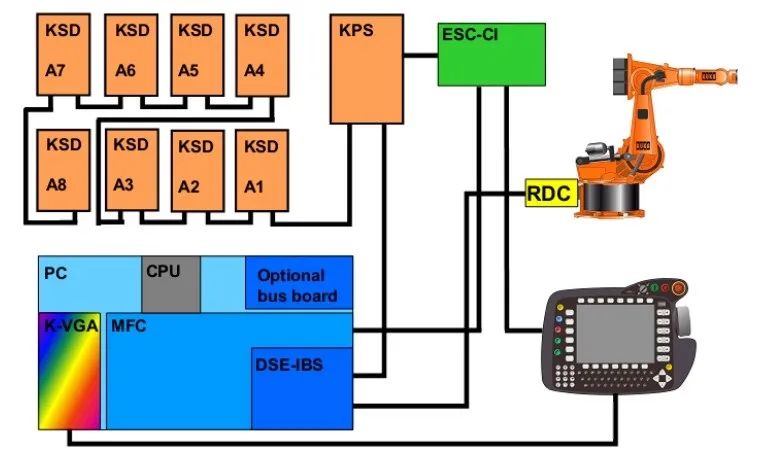
本文地址: https://www.xsyiq.com/7303.html
网站内容如侵犯了您的权益,请联系我们删除。
上一篇: 什么是七轴工业机器人?七轴工业机器人技术、特点和应用
下一篇: 工业机器人的日常检查和维护保养指南
